دوشنبه, ۱۸ آذر ۱۳۹۸، ۰۲:۲۰ ب.ظ
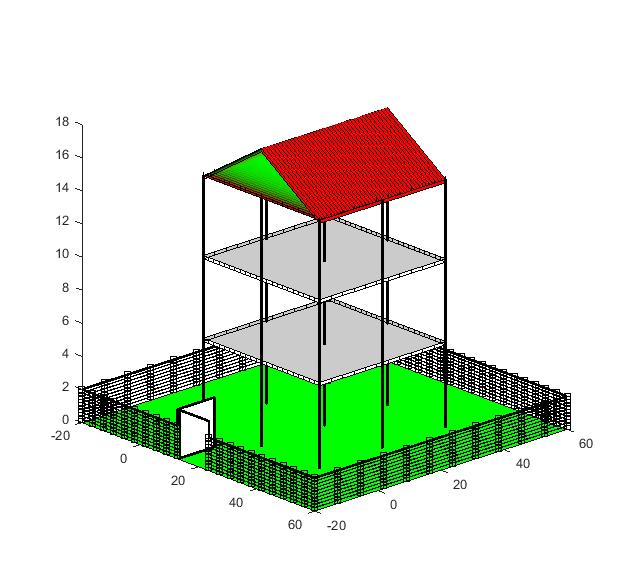
کد یک ویلای نیمه کاره در متلب
%%%%%%%%%%%%%%%%%%%%%%%%%%-----------simulation area-----------%%%%%%%%%%%%%%%%%%%%%%
% devloped in Iran(ardebil) %
% Copyright (C) 2017(1396) by moussa hasanzadeh. %
%All rights reserved. %
%programed in mathlab 2016 %
%gmail:mo30no@gmail.com
%phone: 09147082079
function vlia1
clc
clear;
delete(allchild(0));
sideN=4;
t1=linspace(0,1,sideN+1);%vector between 0 and 1
X=-sin(2*pi*t1+(pi/sideN));%node X coordinates with phaze shift
Y=-cos(2*pi*t1+(pi/sideN));%node Y coordinates with phaze shift
X=((((X-min(X))/(max(X)- min(X)))*2)-1)./5;%normalize and schale X
Y=((((Y-min(Y))/(max(Y)- min(Y)))*2)-1)./5;%normalize and schale Y
Z= (1:length(Y))*0 ;
for x=0:20:40
for y=0:20:40
for z=1:15
plot3(X+x,Y+y,Z+z,'k');hold on
plot3([X+x;X+x],[Y+y;Y+y],[Z+z*0;Z+z],'k');hold on
end
end
end
xVec=[0,20,40,40,20,0,0];
yVec=[0,0,0,40,40,40,0];
zVec1=yVec*0;
zVec1([2,5])=zVec1([2,5])+3;
[xVec,yVec]=dividerE(xVec,yVec,10);
zVec=yVec*0;
[~,zVec1]=dividerE(xVec,zVec1,10);
hj1=fill3([xVec],[yVec],[zVec+5],'w');alpha(hj1 ,1)
hj1=fill3([xVec],[yVec],[zVec+5+0.2],'k');alpha(hj1 ,0.2)
hj3=fill3([xVec;xVec],[yVec;yVec],[zVec+5;zVec+5+0.2],'k');alpha(hj3 ,0.7)
hj2=fill3([xVec],[yVec],[zVec+10],'w');alpha(hj2 ,1)
hj2=fill3([xVec],[yVec],[zVec+10+0.2],'k');alpha(hj2 ,0.2)
hj3=fill3([xVec;xVec],[yVec;yVec],[zVec+10;zVec+10+0.2],'k');alpha(hj3 ,0.7)
hj3=fill3([xVec],[yVec],[zVec+15],'k');alpha(hj3 ,0.2)
hj3=fill3([xVec;xVec],[yVec;yVec],[zVec+15;zVec+15+0.2],'k');alpha(hj3 ,0.7)
xVecPentHous=[0,20,40,20,0];
yVecPentHous=[0,0,0,0,0] ;
zVecPentHous=[15,15,15,18,15];
for mm=1:39
% fill3(xVecPentHous,yVecPentHous+mm,zVecPentHous,'k--')
km=fill3(xVecPentHous,yVecPentHous+mm,zVecPentHous,'g-');hold on
alpha(km,0.2)
end
fill3([xVec],[yVec],[zVec+15],'r')
zVec1=zVec1+15;
fill3([xVec],[yVec],[zVec1],'r-','edgecolor','k')
fill3([xVec],[yVec],[zVec1-0.2],'r-','edgecolor','k')
hj1=fill3([xVec*2]-20,[yVec*2]-20,[zVec],'g');alpha(hj1 ,1)
yardVect=[13:length(xVec),1:10]
hj1=fill3([[xVec(yardVect)*2]-20;[xVec(yardVect)*2]-20],[[yVec(yardVect)*2]-20;[yVec(yardVect)*2]-20],[zVec(yardVect);zVec(yardVect)+2],'r');
for difIndex=1:10
zVec=zVec+0.2;
hj1=plot3([xVec(yardVect)*2]-20,[yVec(yardVect)*2]-20,[zVec(yardVect)],'ks-','lineWidth',1);alpha(hj1 ,1);hold on
end
zVec(11:12)=zVec(11:12)+1;
xVec(11)= xVec(10);
xVec(12)= xVec(13);
hj1=plot3([xVec*2]-20,[yVec*2]-20,[zVec],'k-','lineWidth',2);alpha(hj1 ,1);hold on
zVec([10,13])=0;
door=[10,11,12,13,10]
matrixObj.x=[xVec(door)*2]-20;
matrixObj.y=[yVec(door)*2]-20;
matrixObj.z=[zVec(door)];
[ newx, newy, newz]=rotateParameter(matrixObj,[0,0,1],90);
hj1=fill3(newx-sqrt((xVec(10)-xVec(13)).^2)*1.3, newy-32, newz ,'w','lineWidth',2);alpha(hj1 ,1);hold on
end
function [X,Y]=dividerE(X,Y,n)
T1=0;
T2=0;
for i=1:length(X)-1
temp1=0;
temp1=linspace(X(i),X(i+1),n+2) ;
T1=[T1,temp1(1:end-1)];
end
T1=[T1,temp1(end)];
X=T1(2:end);
for i=1:length(Y)-1
temp2=0;
temp2=linspace(Y(i),Y(i+1),n+2) ;
T2=[T2,temp2(1:end-1)];
end
T2=[T2,temp2(end)];
Y=T2(2:end);
end
function [ newx, newy, newz]=rotateParameter(matrixObj,azel,alpha)
u = azel(:)/norm(azel);
alph = alpha*pi/180;
cosa = cos(alph);
sina = sin(alph);
vera = 1 - cosa;
x = u(1);
y = u(2);
z = u(3);
rot = [cosa+x^2*vera x*y*vera-z*sina x*z*vera+y*sina; ...
x*y*vera+z*sina cosa+y^2*vera y*z*vera-x*sina; ...
x*z*vera-y*sina y*z*vera+x*sina cosa+z^2*vera]';
x = matrixObj.x;
y = matrixObj.y;
z = matrixObj.z;
[m,n] = size(z);
if numel(x) < m*n
[x,y] = meshgrid(x,y);
end
[m,n] = size(x);
newxyz = [x(:) , y(:) , z(:) ];
newxyz = newxyz*rot;
newx = reshape(newxyz(:,1),m,n);
newy = reshape(newxyz(:,2),m,n);
newz = reshape(newxyz(:,3),m,n);
end
این هم یک تصویر از نتیجه کار: